
System Initialize
ALEX MELINE
ENGINEER.
Clarkson University Expected Class of 2030
Half the work happens at 2AM, the other half is making it actually work during the day
Clarkson University Expected Class of 2030
Half the work happens at 2AM, the other half is making it actually work during the day
I’m a high school senior who runs on caffeine and curiosity. I've always been the kind of person who wants to understand how things work — and then actually (attempt) build them.
Through the FIRST Robotics Competition (FRC), I got to turn that into something real. I started as a member and eventually became Programming Team Lead, helping grow the team from just 2 people to 10+. I taught Java, mentored 15+ programmers, and worked to make sure our code was clean, reliable, and actually worked when it mattered.
"Running on caffeine and confidence, the kind of person who says ‘one quick fix’ at 2 AM before a competition and somehow ends up rebuilding half the robot anyway."
TECH_STACK
> initializing neural pathways...
[OK] Idea initialized
[OK] Neural pathways established
[OK] Caffine levels: Optimal
> running self_test()
> STATUS: OPERATIONAL
> UPTIME: 0 HOURS
> CURRENT_TASK: Graduate High School
Clarkson University
Potsdam, NY
RELEVANT COURSEWORK
CAMPUS INVOLVEMENT
Walt Whitman High School
Bethesda, MD
HIGHLIGHTS
INVOLVEMENT
From leading robots all day to projects at 2AM it all matters.
FIRST Robotics Competition
Lead a 10+ student team through the annual 6-week build season, planning, programming, and testing of a 120lb robot for competition.
Walt Whitman High School Tech Lab
Assisted in managing and running the school's 3D printing operations, maintained equipment, provided technical support to students, and wrote documentation for various technical processes and devices.
YMCA Metropolitan Washington
Worked as a STEM Camp Counselor, leading activities for younger children and supporting hands-on STEM learning in a structured camp environment.
Boy Scouts of America
Developed leadership skills and managed a restoration project for a church.
Software, hardware, and mechanical — engineering is all of it.
"Oddyseus" - A FRC competition robot designed and built for the 2026 Rebuilt game from concept to competition-ready.
Over a five week build season, our team designed, built, and programmed a full competition robot for the FIRST Robotics Competition (FRC). As Programming Team Lead, I integrated drivetrain, intake, shooter, and vision systems into one cohesive robot. We developed autonomous routines, and worked closely with mechanical and electrical teams to ensure everything functioned reliably. I also mentored newer programmers and helped grow the team from 2 to 10+ members.
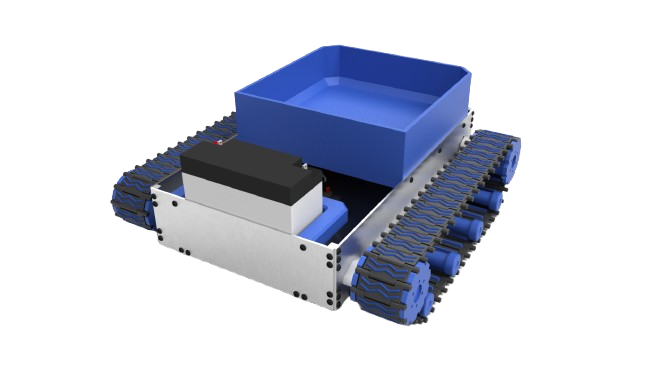
Highschool Capstone Project produced by WeRobot (me) for firefighters logistics during emergencies.
We designed and prototyped RoboOx, a compact tracked robot intended to support firefighters during interior structural fire operations. The project combines mechanical design, electronics, drivetrain systems, and software to create a durable transport platform capable of carrying critical equipment through hazardous environments. We developed the chassis, custom track system, electrical integration, and control architecture while focusing on reliability, maneuverability, and practical fireground logistics support.

Computer vision pipeline for AprilTag detection tracking, targeting, and autonomous navigation.
During the five week FRC season, my team and I developed a computer vision pipeline for AprilTag detection and targeting. We deloped code in which real-time processing and pose estimation were implemented to enable accurate target detection and shooting using a variable hood, flywheel, and turret to shoot the gamepiece into the target even if the bot was moving.

3D printed Night vision using screens and Runcam Night Eagle 2 cameras. Includes Custom PCB's, 3D printed components, and firmware.
I designed (albeit at 2 AM) a 3D-printed night vision system using a Runcam Night Eagle 2 camera and small display screens to create a wearable low-light vision setup. The project combines mechanical design, electronics, and firmware. I created custom 3D-printed mounts and housing, designed PCBs for power and signal routing, and developed firmware to handle stable camera input and display output. The main challenge was integrating everything into a compact, reliable system that could function as a single unit.
Currently open for engineering internships, co-ops, and discussions about robots that go too fast.